讓機器人從失敗中學習
henry 發自 凹非寺
量子位 | 公眾號 QbitAI
看似輕描淡寫,實則力透紙背。
Physical Intelligence刷屏全網的機器人基礎模型π*0.6,一亮相就秀出了實力:
讓機器人連續一整天製作意式濃縮咖啡,數小時不間斷摺疊各類衣物,還能精準組裝工廠所需的包裝紙箱。
在π*0.6的加持下,這些任務的成功率都達到了90%以上。
然而,仔細閱讀論文就會發現,比起連做13個小時咖啡,π*0.6真正的突破在於引入了一種更直覺的學習方法——Recap:
- 指導:用人類示範教它基礎動作
- 輔導:糾錯指導讓它修正錯誤
- 練習:從自主經驗中不斷優化、變得更強
這徹底扭轉了過去機器人只會逼近 「真值」 的模仿學習模式,讓機器人能從自己的錯誤中成長。
就連網友也直呼:
從錯誤中學習,這不比人都強?

最強VLA模型——π*0.6
π*0.6延續了Physical Intelligence此前一貫的VLA(視覺-語言-動作模型)路線,是今年四月份釋出π0.5以來最新的VLA模型。
總的來說,π*0.6的核心貢獻在於提出了一種通用訓練方法——基於優勢條件策略的經驗與糾偏強化學習(RL with Experience & Corrections via Advantage-conditioned Policies,RECAP)。
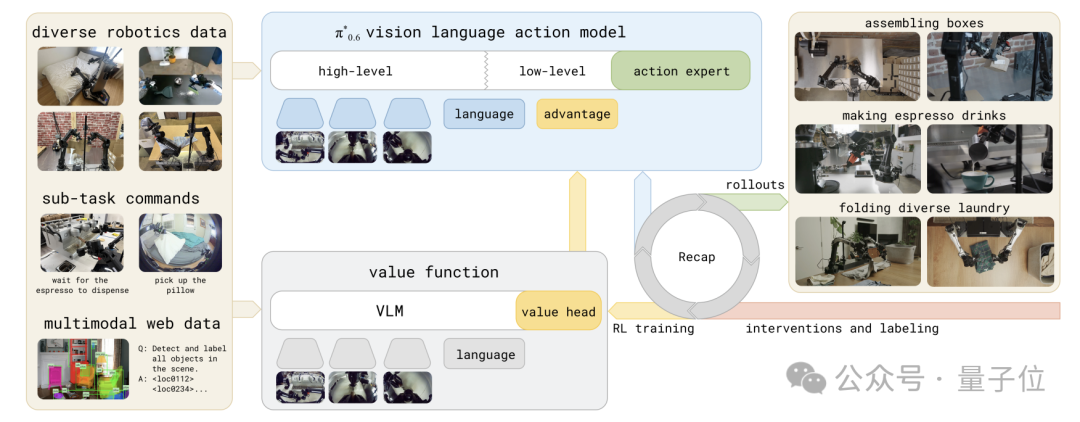
RECAP讓VLA能夠使用獎勵反饋和人類介入進行訓練,其主要包含三個階段:
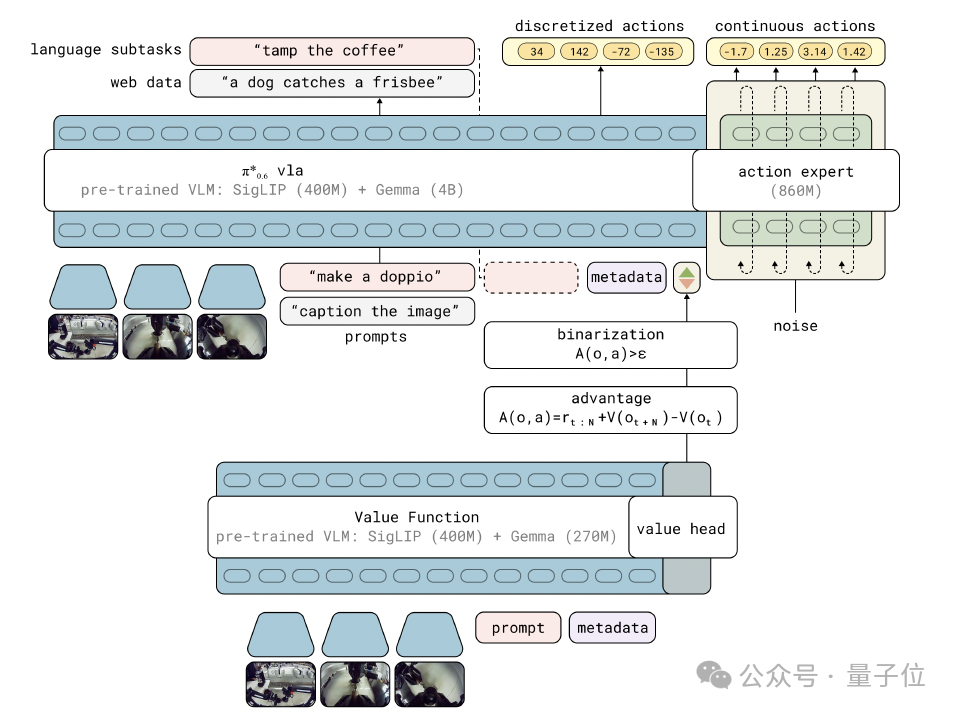
- 離線RL:基於多機器人、多工的示範資料(包括失敗資料)訓練價值函式和策略
- 微調:用人類示範將π*0.6適配到具體任務(咖啡/折衣服/組裝盒子)
- 線上階段:機器人自主執行任務,獲得稀疏獎勵,並結合專家線上糾偏,更新價值函式,再通過優勢條件化改進策略
接下來,讓我們具體來看。
首先,對於為什麼RECAP選擇價值函式,而不是標準的策略梯度,這裏有個關鍵的巧思。
一方面,真實機器人資料極度異構:包括人類示範、專家干預、以及機器人在不同策略下的執行軌跡。標準的策略梯度方法需要on-policy的新鮮資料,難以有效吸收這些歷史混合資料,因此天然不適合具身場景。
另一方面,VLA模型基於Flow Matching生成連續動作,這類模型沒有顯式的log π(a|s),導致無法像傳統策略那樣對直接求梯度。
換句話說,PPO、REINFORCE 這些演算法在這種模型結構上根本施展不開。
因此,RECAP沒有走傳統RL的路線,而是採用了一個巧妙的「優勢條件化」策略:
模型仍按監督學習方式訓練,但額外給它一個輸入,告訴它當前動作的優勢值(advantage)。優勢越高,代表「這個動作更值得模仿」。
於是整個流程變成了:
價值函式負責評價 → 優勢條件化負責表達 → VLA用監督學習吸收所有資料
換句話說,RECAP用價值函式判斷動作質量,再用優勢條件化把原本需要RL求解的策略更新,重新寫成了大模型最擅長的監督學習問題。
訓練價值函式與策略提取:
爲了讓模型從異構資料中學習,首先需要訓練一個能夠識別「好壞」的價值函式。無論資料來自哪裏(演示或自主嘗試),處理過程如下:
- 計算經驗回報:對每條軌跡,從當前時間步到結束計算累計回報,並歸一化、離散化成201個區間,為價值函式提供訓練目標。
- 訓練分散式價值函式:用多工分散式價值函式預測離散價值分佈,通過最小化交叉熵損失進行訓練,再提取連續價值函式,得到每個狀態-動作的實際價值。
- 計算優勢(advantage):用動作的實際回報減去價值函式預測,得到優勢值,並二值化形成高/低優勢指標,作為策略訓練的額外輸入,引導模型選擇更優動作。
有了優勢訊號,我們就能實現高效的策略提取。這種方法完美滿足了前文提到的對離線RL的需求:
- 充分利用多樣化的離策略資料:包括最初的人類示範、專家干預,以及機器人自主執行的軌跡(既有最新策略的,也有早期策略的)。
- 可擴充套件性:方法需要能夠應用於大型VLA模型,包括那些使用流匹配(flow matching)或擴散(diffusion)生成動作的模型。
- 同時利用優劣資料:既要有效利用近似最優的動作,也要利用次優動作的資料,這對於通過自主經驗提升策略尤其重要。
通過這種設計,RECAP成功地在不依賴昂貴線上PPO更新的情況下,利用混合質量的離線資料實現了機器人的自我進化。
線上階段:專家糾錯 + 自主經驗
在機器人自主執行階段,RECAP通過兩類資料持續優化策略:
- 專家糾錯:專家遠端干預糾正嚴重錯誤(如紙箱摺疊順序顛倒),每一次糾錯動作都會被標記為「正向優勢」,訓練模型學習如何恢復錯誤。
- 自主經驗:模型自主完成的軌跡,無論成功還是失敗,都納入訓練資料。通過價值函式和優勢指標,自動篩選有效訊號,優化精細動作。
模型架構與效能
π*0.6是在π0.6基礎上構建的,而π0.6又是對π0.5的升級版本。
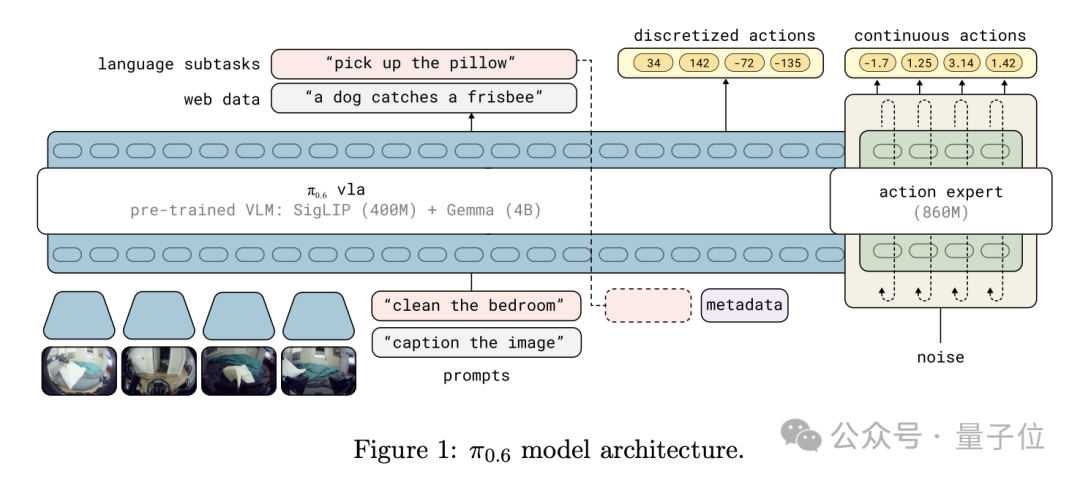
π0.6的Backbone從Pi0、π0.5的Gemma(2.6B)擴充套件到Gemma3(4B),Action Expert引數量也升級到了860M。
在模型架構方面,π0.6延續了π0和π0.5架構,通過流匹配(flow matching) 和離散動作token 輸出生成動作片段。
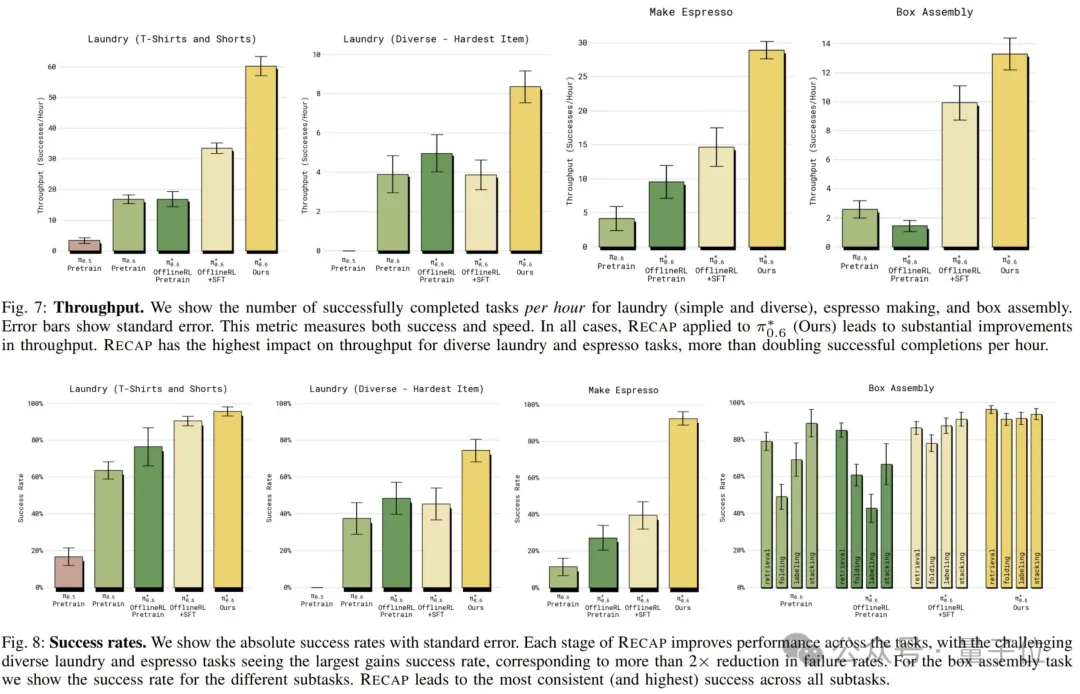
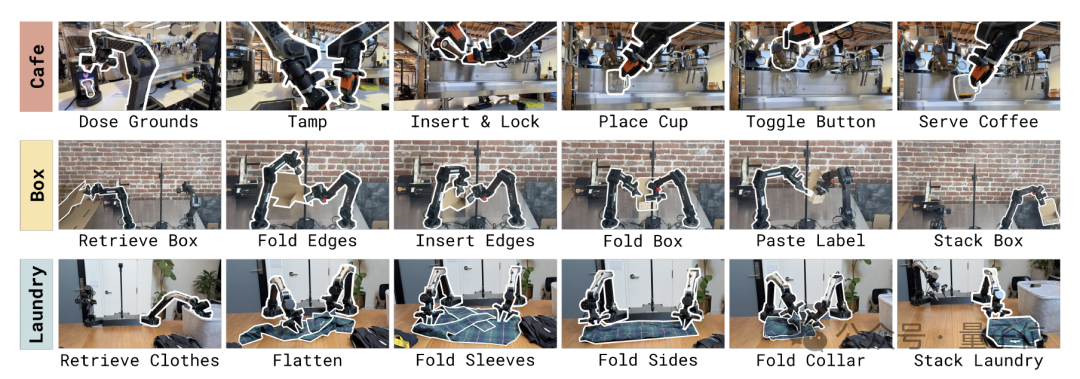
從實驗來看,研究團隊在三個高難度的現實任務中評估了模型:摺疊多樣化的衣物、組裝紙箱(工廠環境)和製作濃縮咖啡。
在最難的任務(如摺疊多樣化衣物和製作咖啡)中,RECAP將任務的吞吐量(每小時成功次數)提高了一倍以上,相比於僅進行監督微調(SFT)的模型,RECAP將任務失敗率降低了約2倍。
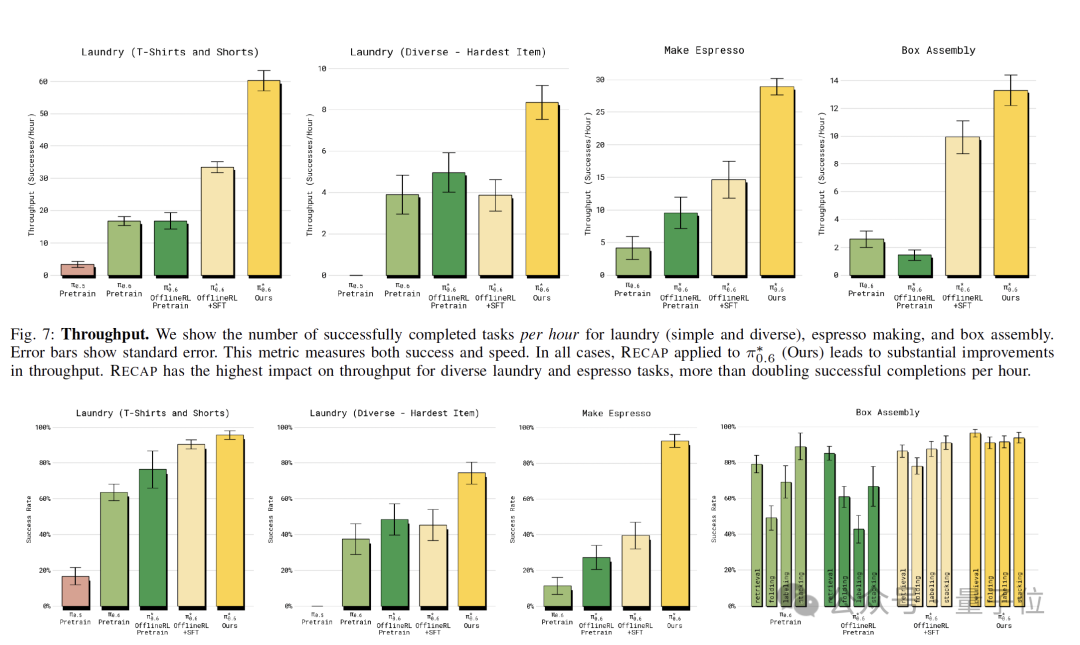
與此同時,模型表現出極高的穩定性,例如連續13小時製作咖啡、連續2小時摺疊衣物而無需人為重置。
從失敗經驗中學習
正如開頭提到的,Recap最具啓發性的地方,莫過於它讓機器人能夠從錯誤經驗中學習。
俗話說「失敗乃成功之母」,但在傳統的模仿學習,乃至更廣泛的監督學習中,逼近真值或最優解通常被認為是最直接、最有效的策略。
這種方法在大規模語言模型(LLM)和其他機器學習系統上確實表現出色,數學上也簡潔優雅。
然而,對於現實世界的機器人,僅僅知道如何做對,卻不知道如何從錯誤中恢復,就會成為關鍵障礙。
在LLM等生成靜態輸出的AI系統中,監督學習假設資料是獨立同分布(i.i.d.),預測輸出不會影響後續輸入,因此偶爾的偏差不會帶來致命問題。
但對於需要持續與外界互動的系統,例如機器人,情況則完全不同。
模仿學習中模型的每一次動作都會影響未來狀態,一旦出現輕微錯誤,就可能進入訓練資料未覆蓋的新狀態,從而觸發滾雪球式誤差。這些錯誤疊加後,任務可能徹底失敗。
因此,要想讓機器人「每次都成功」,光靠複製示範資料是不夠的。
解決之道在於:讓視覺-語言-動作(VLA)模型能夠從自身實際犯過的錯誤中學習,就像人類通過練習不斷糾正失誤一樣。
問題在於,這些經歷該如何標註?如果簡單地讓模型複製過去的行為,它只會學會重複錯誤。關鍵是如何從「壞資料」中提煉出有效的訓練訊號。
Recap通過指導中輔以糾正,練習中輔以強化來實現這一點:
教練式糾偏(corrections)當機器人犯錯時,專家通過遙操作介入,示範如何恢復、如何更好地完成任務。
不同於傳統的示範教學,這裏不是教「該怎麼做」,而是教「當事情出錯時該如何修正」。
這種針對性糾偏彌補了傳統模仿資料的不足,是防止錯誤累積的關鍵。
強化學習(reinforcement learning)
然而,僅僅依靠人類提供糾正措施是遠遠不夠的,機器人需要自主學習。
機器人需要根據一個回合的總體結果自行判斷其行為的好壞,並迭代地學習執行好的行為,同時避免壞的行為。
由此,就引出了基於對錯獎勵的強化學習。
如上文所說,爲了實現強化學習,核心在於解決信用分配(credit assignment)的問題。
比如,要知道機器人執行的哪些動作導致了好的結果,哪些動作導致了壞的結果。
這裏,Recap通過訓練一個價值函式(value function)來應對這一挑戰,它可以預測當前狀態相較於其他狀態的優劣。
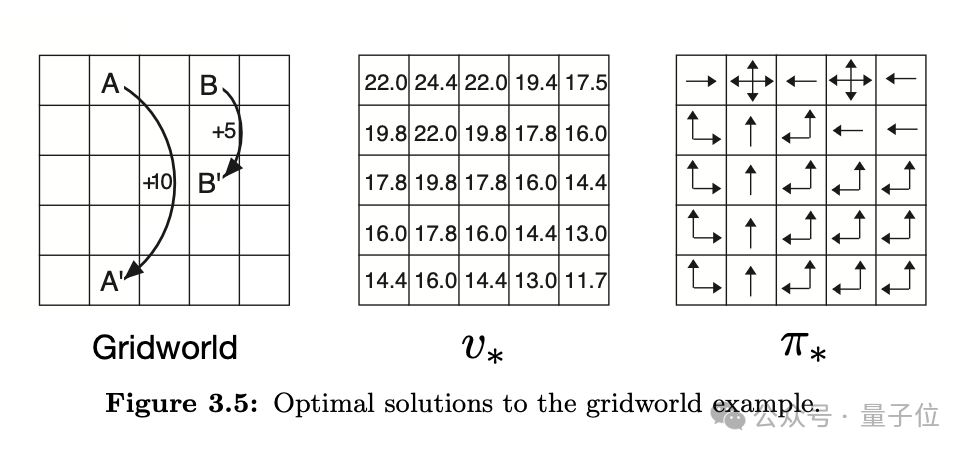
△圖源:Reinforcement learning: An introduction
舉例來說,在經典的格子世界中,智慧體會通過一次次嘗試更新每個狀態的價值:落在好格子上,價值提高;掉進壞格子裡,價值降低。
隨著價值評估逐漸準確,智慧體自然會傾向於選擇那些通向高價值狀態的動作。
同樣的邏輯放到機器人身上:價值函式的變化為模型提供了一個簡單而強大的判斷訊號。
- 讓價值上升的動作:代表機器人朝任務成功更近了一步,應當被強化;
- 讓價值下降的動作:意味著偏離目標,需要被抑制或修正。
舉例來說,在摺疊衣服任務中(左圖),紅色區域表示機器人突然將衣服拉起的錯誤動作,對應價值下降;而綠色區域表示機器人正確完成摺疊時,價值上升。
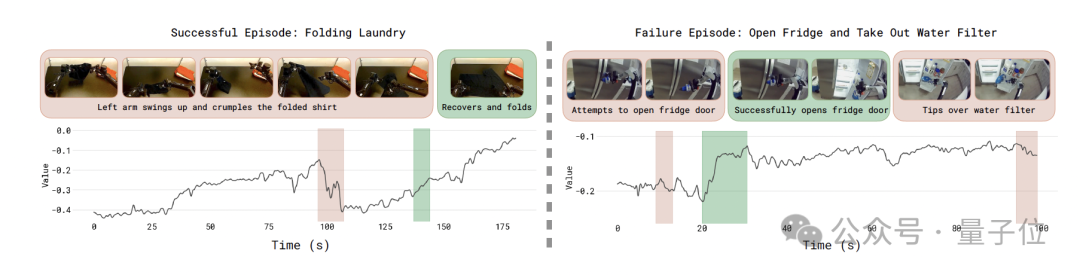
可以說,價值函式幫助機器人識別「關鍵步驟」與「錯誤來源」,讓它真正具備在複雜真實環境中從經驗中變強的能力。
當訓練好價值函式後,下一步是「策略抽取」:讓策略(即VLA模型)以價值變化為條件進行訓練。
所有資料——包括成功和未成功——都被保留,同時告知模型哪些動作是有效的、哪些動作應避免。
這種優勢條件化(advantage-conditioned)訓練能夠讓模型在保留全部經驗的前提下,從失敗中學習,從而表現超越單純示範資料的水平。
綜上,Recap不僅讓機器人學會了執行任務,更重要的是,它讓機器人學會了自我糾正和優化策略,為後續複雜任務的魯棒性和效率提升提供了可擴充套件的解決方案。
與此同時,如果從好資料(示範)少,壞資料(錯誤經驗)多的視角來看,π*0.6 的突破可能更具深遠意義 ——
它證明了機器人能從真實執行中收集的 「不完美經驗」 裡,提煉出高效的學習訊號,這也為後續機器人研究開闢了全新思路,提供了極具價值的探索方向。
參考連結:
[1]https://www.pi.website/download/pistar06.pdf
[2]https://www.pi.website/blog/pistar06
[3]https://www.physicalintelligence.company/download/pi05.pdf
[4]https://x.com/svlevine/status/1990574916622856290