機器之心原創
作者:高靜宜、微胖
9 月 20 日,百度在北京召開 Apollo 1.5 開放技術發佈會。百度智能駕駛事業羣組總經理李震宇宣佈 Apollo1.5 自動駕駛平臺正式對業界開放,新增五大能力,包括障礙物感知、決策規劃、雲端仿真、高精地圖服務以及端到端的深度學習。發佈會上,Apollo 宣佈與激光雷達製造商 Velodyne、教育平臺 Udacity 等公司分別展開合作,進一步爲 Apollo 生態賦能。此外,百度攜手長江產業基金共同成立的 Apollo 基金宣佈啓動「雙百計劃」,將在未來三年投資 100 億元人民幣,實現超過 100 個項目的投資。
2017 年 9 月 20 日,百度「Apollo 計劃」迎來首次升級:Apollo1.5。
4 月,百度首次宣佈推出「Apollo 計劃」,嘗試開放其在自動駕駛領域的相關技術,包括車輛、軟硬件以及雲服務四大塊內容。7 月推出 Apollo 1.0 後短短兩個月個半月時間,Apollo1.5 新增五大功能:障礙物感知、決策規劃、雲端仿真、高精地圖服務和端到端的深度學習。
爲汽車製造商和其他合作伙伴提供軟件平臺和解決方案服務,意味着百度已經放棄研發自動駕駛汽車,走上跟傳統車企合作發展自動駕駛的路線。據悉,Apollo 團隊快速迭代算法,每週更新代碼數十次。截至目前,全球自動駕駛開源社區中共有 1300 多個合作伙伴通過 Gtihub 使用了 Apollo 平臺的開源代碼,近百個合作伙伴申請開放數據。

Apollo 開放路線圖
Apollo 1.5 新增五大核心能力,支持晝夜定車道自動駕駛
自動駕駛技術主要由感知、定位、決策和控制四個模塊組成。Apollo1.0 開放了封閉場地的循跡自動駕駛能力,能夠實現控制、定位等功能。
據 Apollo 平臺研發負責人王京傲介紹,Apollo1.0 發佈以後,開發者也針對整個平臺提出一些問題,也希望能夠看到更多的開放能力。爲此,Apollo1.5 新增五大功能:障礙物感知、決策規劃、雲端仿真、高精地圖服務和端到端的深度學習。

圖爲 Apollo 定車道晝夜自動駕駛架構,其中標黃部分爲 Apollo 1.5 新增的功能
互聯網企業研發自動駕駛,跟傳統車企技術路徑的區別,主要在於感知和決策環節具有深度學習模型驅動下的人工智能系統。
這次開放的一大亮點是新增晝夜定車道自動駕駛功能。該功能不僅能在夜間惡劣的視覺環境下精準識別障礙物,還可識別出異性障礙物,比如大型犬、足球、垃圾桶等。
據 Apollo 平臺資深架構師繆景皓介紹,Apollo1.5 的障礙物感知模塊採用的是基於 64 線激光雷達的解決方案,在深度學習算法幫助下,可 24 小時精準追蹤、識別 3D 障礙物。同時,結合高精地圖提供的在線服務與 GPU 運算平臺系統,感知部分的運算有效性大幅提升,可快速實現從原始典型數據到障礙物的追蹤、識別的整個過程。
「如果說無人車的障礙物感知是一雙眼睛,那麼,障礙物行爲預測功能就是無人車的大腦。」繆景皓比喻道。障礙物的行爲預測是將感知獲得的障礙物信息完成時間和空間上的延伸,運用深度神經網絡針對預測模型進行建模,達到精準預測路徑的目的。爲了不同類型的障礙物,平臺配備了不同預測軌跡的規劃算法,而且算法均可插拔,具有較高的靈活性。
在決策與規劃方面,爲了保證無人車可以安全、準確地規避所有障礙物,具備點到點的自動行駛能力,Apollo1.5 發佈了不分晝夜的定車道自動駕駛功能。在對導航、感知、預測、定位等過程的數據完成篩選和聚合後,決策規劃模塊會對輸入的多維數據進行環境重構。在這個過程採中,不同種類的優化器不斷進行多次循環、互相迭代,最終爲無人車打造一條高質量、安全的行車路徑。

端到端的學習能力
在端到端的深度學習方面,Apollo 平臺具有較高的普適性,橫向輸出時間,縱向輸出速度和加速度,可以適配不同的底層結構。
在高精地圖服務和雲端仿真平臺這兩大核心能力上,Apollo 平臺解決方案負責人孫勇義進行了詳細的解讀。

孫勇義介紹 Apollo 高精地圖服務
「Apollo 的高精地圖是最懂自動駕駛的地圖,視爲自動駕駛而生的。」孫勇義解釋道。精細化程度高、生產效率高、覆蓋面廣,是 Apollo 高精地圖的三大優勢。
高精地圖與普通地圖的區別在於定位的精度與元素的豐富度,在高精定位、環境感知、決策規劃和雲端仿真環節也發揮着重要作用,降低自動駕駛難度的同時,也大幅提升技術安全性。目前,Apollo1.5 高精地圖的定位精度可以達到 15-20 釐米,地圖生產製作流程自動化率達到 90% 以上,已覆蓋了全國大部分高速及部分城市道路,並計劃在 2020 年覆蓋全國所有高等及道路和重點城市道路。
Apollo 仿真平臺能夠解決自動駕駛技術開發者的三大痛點——成本、效率、安全。Apollo1.5 仿真平臺具有四大優勢:內置高精地圖、擁有海量場景、雲端計算能力、專業度量體系。
此次發佈的版本開放了仿真場景、算法上傳與場景運行、智能判別系統及算法 3D 可視化四個功能。其中,仿真場景功能包括十字路口、彎道等路型,人、機動車、非機動車等障礙物類型,直行、調頭、並道等道路規劃和紅綠燈信號場景;算法上傳與場景運行功能支持同時多場景的高速運行以及單個算法模塊的上傳運行;智能判別系統開放了五個判別標準,分別爲碰撞檢測、闖紅綠燈檢測、限速檢測、在路檢測、到達目的地檢測;算法 3D 可視化功能可以提供限速、當前車道等實時路況信息,路徑規劃、動態障礙物、無人車規劃軌跡等算法模塊輸出的可視化信息以及速度、剎車油門狀態等全局信息。
孫勇義透露,這只是開放了 Apollo 自動駕駛的基礎仿真能力,今年年底開放的 2.0 版本將包括真實場景,增加場景的多樣性和複雜度,在度量維度、計算力和地圖方面將有大幅度提升,並計劃在 2018 年開放日行百萬公里的能力。

仿真能力開放路線圖
「朋友圈」擴圍,未來商業模式或是雲服務
Apollo 也面臨着與其他造車聯盟的資源競爭和挑戰。
目前,17 位新成員加入 Apollo 社區中,Apollo 平臺的合作伙伴已經擴大至 70 家。新增合作伙伴包括 OEM 主機廠、Tier1 供應商、開發者生態公司以及初創科技公司等。其中,Apollo 與激光雷達製造商 Velodyne 宣佈合作。

Apollo 與 Velodyne 宣佈合作
Velodyne 亞太區總負責人翁煒承諾,Apollo 的生態成員可享受百度的價格體系,還在現場宣佈正式向中國市場發售 32C 激光雷達產品。

Velodyne 32C 激光雷達參數性能
據百度副總裁鄔學斌介紹,百度正從資金扶持、數據集和標註工具、軟件合作方、硬件合作方、開發者社區和測試場地六個角度全方位爲開發者賦能。
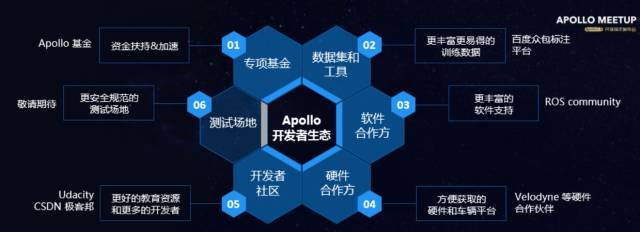
Apollo 開發者生態的全景圖
百度正在募集 Apollo 基金,未來三年,將向自動駕駛產業投資 100 億元,惠及 100 個項目。
「Apollo 基金的目的是活躍 Apollo 社區,爲社區的主體——開發者,提供更多的支持。」鄔學斌稱。從 7 月份成立至今,Apollo 基金,第一期已經完成多起投資,累積達到 20 億元人民幣。Apollo 基金還將啓動「雙百計劃」,即在未來三年至少在 100 個項目上投資 100 億元人民幣。
「我們面臨的是新科技,從傳感到計算,很多東西在未來幾年的變化和發展會非常大。目前我們沒有辦法制定出一個非常明確地目標,只能說我們的投資方向是爲了活躍整個 Apollo 社區。」在發佈會後的羣訪環節中鄔學斌表示。

百度副總裁鄔學斌
在數據方面,百度數據衆包平臺擁有超過 5000 個標註人員的龐大團隊。經過專業培訓的標註人員可以使用智能的標註工具及手段,實現自動駕駛車輛 2D、3D、高精地圖等 20 餘種場景的標註。硅谷自動駕駛系統研發公司 Plus.ai 研發副總裁付強也在發佈會上現身說法,分享基於 Apollo 平臺數據標註服務高效獲取標註數據的經驗。
Apollo 在仿真平臺、高精地圖、資源共享等方面投入了大量的人力和資金。作爲一家上司公司,百度也在考慮未來的商業模式。「只講一個原則,未來百度 Apollo 的盈利模式就是從雲端提供服務。」鄔學斌表示。
在大會上,Apollo 宣佈與教育平臺 Udacity 合作,聯手推出自動駕駛全體系課程,並與 ROS 展開深入合作,進一步促進自動駕駛領域開發者的信息交流。
本文爲機器之心原創,轉載請聯繫本公衆號獲得授權。
責任編輯: