選自BAIR Blog
作者:Changliu Liu、Masayoshi Tomizuka
在學者的眼中,未來的工業自動化很大程度上需要人類與機器人進行高效率的協作。然而,由於環境的複雜度和人類動作的隨機性,機器人系統與機器學習算法的設計一直面臨很大挑戰。伯克利人工智能研究所(BAIR)近日撰文介紹了旗下機械系統控制實驗室(MSC)開發的安全機器人交互系統,可以顯著減少人機協作過程中問題的發生機率。
工廠機器人的實用化
現代工廠中的主要勞動力是人類和機器人。出於安全考慮,工廠通常會將機器人限制在金屬籠中,以將人類和機器人分開,然而這一行爲限制了生產線的生產力和靈活性。近年來,人們開始想要移除網箱,這樣可以使人類和機器人合作,以建立真正的人機共存的工廠。製造商想要建立一條結合了人類的靈活性和機器人的生產力的有彈性的生產線。工業聯合機器人的潛在好處是很大的,例如,他們可以加入人類和機器人同時工作的有彈性的生產線上,在這條生產線上機器人和人類會合作處理工件,工人也會自行部署 AGV(automated guided vehicles,自動導引運輸車)來緩解工廠物流壓力。在未來的工廠中,人機交互的情況會變得越來越多。與在結構化和確定性環境中工作的傳統機器人不同,聯合機器人要在非結構化和隨機的環境中運行。在這之中的根本問題在於該如何確保聯合機器人在不確定的動態環境中高效安全地運行。本文中,我們將介紹 MSC(http://msc.berkeley.edu/)實驗室開發的安全的機器人交互系統。
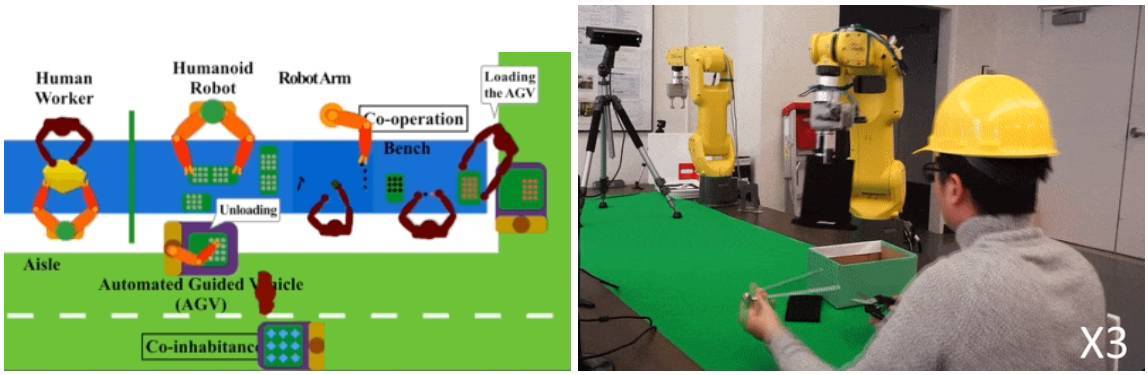
圖 1. 人與機器人合作的未來工廠。
現有的解決方案
包括 Kuka、Fanuc、Nachi、Yaskawa、Adept 和 ABB 在內的機器人制造商都在努力解決這個問題。也發佈過一些安全的協作機器人或聯合機器人,如 FANUC(日本)的 CR 系列、Universal Robots(丹麥)的 UR5、Rethink Robotics(美國)的 Baxter、Kawada(日本)的 NextAge和 Pi4_Robotics GmbH(德國)的 WorkerBot 等等。然而,這些產品的關注點都在於機器人本身的安全,如機械設計、制動和低等運動控制等方面。但在機器人與人類進行交互行爲的安全性方面仍需不斷探索,而這一行爲也是機器人智能化(包括感知能力及高等行爲的規劃與控制等)的重點。
技術挑戰
從技術上講,設計工業聯合機器人的行爲極具挑戰性。爲了使工業聯合機器人人性化,它們應該具備收集環境數據並分析這些數據的能力,以適應不同的任務和不同的環境,機器人還應能根據工人的需要自動調整。例如,在下圖所示的人機協同組裝過程中,機器人應該能夠預測,一旦工人將兩個工件放在一起時需要工具來固定組件。那麼機器人應該能夠拿到工具並交給工人,同時避免碰到工人。
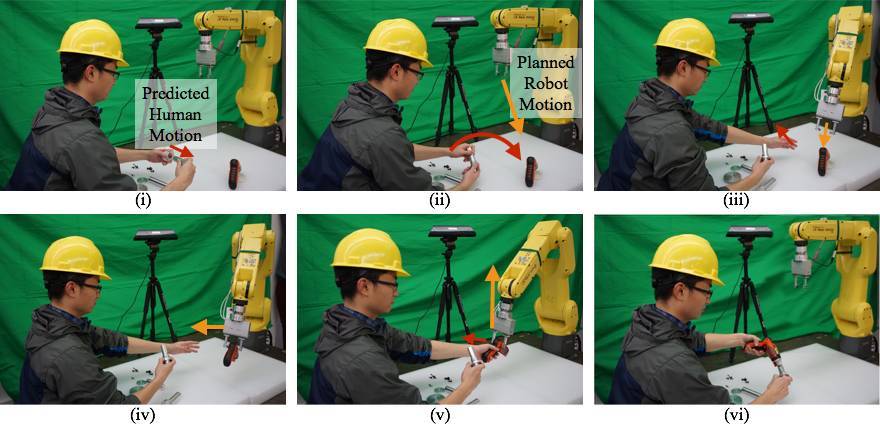
圖 2. 人與機器人協作組裝工件。
爲了實現這樣的行爲,我們在技術上的挑戰在於:(1)人類行爲的複雜性;(2)在不損失效率的情況下保證安全。人類運動的隨機性給系統帶來的巨大的不確定性難以保證機器人的安全和效率。
安全的機器人交互系統與實時非凸優化
MSC 實驗室開發的安全的機器人交互系統(RSIS,robot safe interaction system)建立了一種設計機器人行爲的方法,可以在人機交互過程中在保證安全的同時保證效率。
由於機器人需要與人類長期進行交互行爲,讓機器人模仿人類行爲是很自然的。人類因有意識的思考或條件反射而發生互動行爲。例如,前方發生追尾時後車司機會本能地踩剎車。然而,經過短暫的考慮後,司機可能會加速切入另一條車道以避免連鎖追尾。前者是短期的安全反應行爲,而後者需要計算當下的情況,例如,是否有停車的空間,是否有換車道的空位,換車道和馬上停車哪個比較安全等。
現在有一種模擬了這種行爲的並行計劃和控制體系的結構,該結構包括長效規劃器和短效規劃器。長效規劃器(效率控制器)強調效率,解決了低採樣滾動時域優化中的長期最優控制問題。短效控制器(安全控制器)通過基於效率控制器規劃軌跡解決高採樣率的短期最優控制問題來解決實時安全問題。這種並行架構也解決了不確定的問題,長效規劃器根據其他人最有可能的行爲做出計劃,短效規劃器在短時間內考慮幾乎所有的其他人可能的行動,以確保安全。
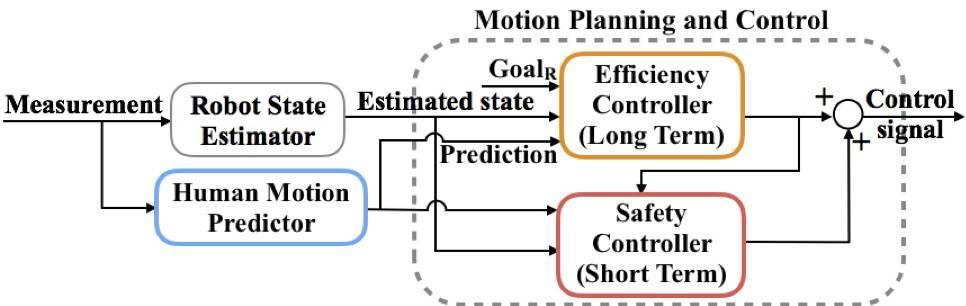
圖 3. 機器人安全交互系統中的並行計劃與控制體系結構。
然而,集成環境下的機器人運動規劃問題具有高度的非線性和非凸性,因此難以實時解決。爲了確保機器人對環境變化能做出即時的響應,該實驗室開發了實時計算的快速算法,例如用於長效優化的 CFS(convex feasible set)算法和用於短效優化的 SSA(safe set algorithm)算法。這些算法在假設原始非凸問題具有凸目標函數的情況下,通過凸化來實現更快的計算,但是這樣的處理限制在非凸情況下。CFS 通過迭代求解可行域中凸子集下的子問題。問題解的序列將會收斂到一個局部最優。CFS 比一般的非凸優化求解器(如 SQP(sequential quadratic programming)和 ITP(interior point method))迭代次數更少,運行速度更快。另一方面,SSA 使用不變集的思想將非凸狀態空間約束轉化爲凸控制空間約束。
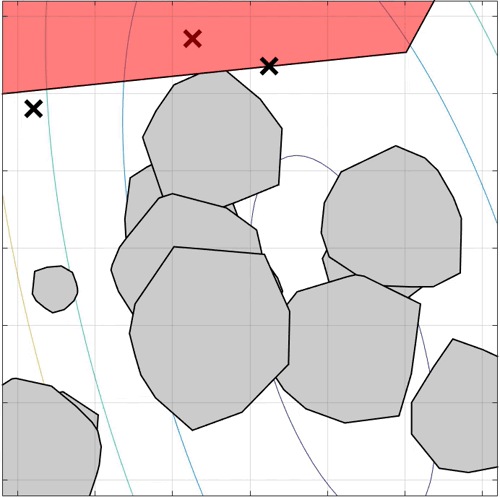
圖 4. 在 CFS 算法中凸化的例子。
利用並行計劃器和優化算法,機器人可以安全地與環境交互,並高效地完成任務。
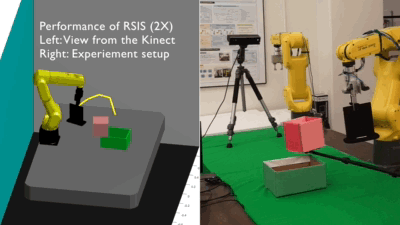
圖 5. 運動的實時計劃與控制。
面向通用智能:安全高效的機器人協作系統(SERoCS,Safe and Efficient Robot Collaboration System)
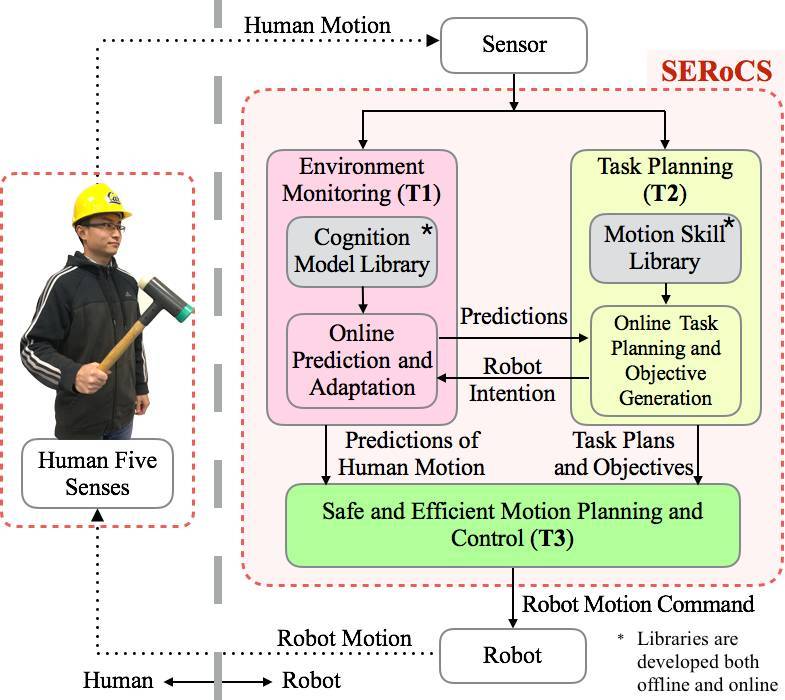
我們現在在 MSC 實驗室中研究 RSIS 的高級版本,這是一個安全高效的機器人協作系統(SERoCS, http://msc.berkeley.edu/research/serocs.html),它得到了國家科學基金會(NSF)的支持(Award#1734109 https://www.nsf.gov/awardsearch/showAward?AWD_ID=1734109&HistoricalAwards=false)。除了在人機交互(HRI,human-robot interactions)過程中安全地規劃和控制運動的算法外,SERoCS 還包括用於環境監測的魯棒的認知算法和保證人機協作安全的任務最佳規劃算法。SERoCS 將顯著擴大聯合機器人的技能組合,防止或減少機器人和人類或機器人與機器人在運行過程中碰撞事故的發生,從而在未來可以實現和諧的人機協作。
參考資料
C. Liu, and M. Tomizuka,「Algorithmic safety measures for intelligent industrial co-robots,」in IEEE International Conference on Robotics and Automation (ICRA), 2016.
C. Liu, and M. Tomizuka,「Designing the robot behavior for safe human robot interactions」, in Trends in Control and Decision-Making for Human-Robot Collaboration Systems (Y. Wang and F. Zhang (Eds.)). Springer, 2017.
C. Liu, and M. Tomizuka,「Real time trajectory optimization for nonlinear robotic systems: Relaxation and convexification」, in Systems & Control Letters, vol. 108, pp. 56-63, Oct. 2017.
C. Liu, C. Lin, and M. Tomizuka,「The convex feasible set algorithm for real time optimization in motion planning」, arXiv:1709.00627.
原文鏈接:http://bair.berkeley.edu/blog/2017/12/12/corobots/