分辨率達 300 線,價格降到 1000 美元,實現激光雷達點雲與相機視頻數據在硬件層次的融合,鮑君威創辦的 Innovusion 試圖提供一套滿足自動駕駛量產需求的軟硬件解決方案。
2016 年 10 月,鮑君威結束了自己在百度自動駕駛事業部擔任車載計算系統及傳感器團隊負責人的工作,在他的一套出租屋裏,和自己的老同事李義民開始了創業之路。
一開始,他們花了一個多月的時間進行市場調研和各類技術路徑的研究,最終選擇激光雷達產品及傳感器融合的方案。
技術路徑的選擇並不容易,近年來,投身自動駕駛技術研發大潮的公司或者汽車廠商均不在少數。各家技術路徑可能有所不同,採用的傳感器種類或是算法模型也存在差異。
「我們需要清晰地分析整個產業各方面的路徑,而不是盲目跟從現有的解決方案。」鮑君威解釋道,跟着市場領導者走肯定是對的,但激光雷達產業很新,還沒有哪一條路徑被完全驗證是最優方案。「畢竟這是一個新的技術方向,其中的不確定性還是蠻強的。現在我們出了產品對自己的技術也是有信心的,但在這個過程中也需要逐漸調整。」
今年 4 月,國外激光雷達創業公司 Luminar 宣佈將推出首批無人車用激光傳感器,採用了 1550 納米激光器,探測距離大幅提高達到 200 米以上,分辨率提高了 5 倍。由於其產品性能的優越性,Luminar 的一舉一動都成爲了業內關注的焦點,一時風頭無兩。
這家明星公司放棄波長較近的 905 納米激光器轉而採用 1550 納米光纖激光器,被鮑君威視爲是技術思路上的契合,某種程度上,也讓他對 Innovusion 的選擇更有信心。「1550 納米光纖激光器峯值的功率相對容易做得更高,還可以讓激光雷達在人眼安全閾值的條件下發射更強的光信號,對物體測量距離更遠更精確。」鮑君威說。
「300線」激光雷達獲取圖像級信息
這並不是鮑君威初創的第一家公司。多年前,他曾參與研發了一套用於半導體生產線的光學測量系統,並在 2001 年被日本公司收購。
這次,他與李義民一拍即合,瞄準了激光雷達領域。鮑君威在光學精密測量儀器及傳感器領域有近二十年工作和研發經驗,2014 年加入百度美國研發中心,負責開發大規模數據中心硬件加速及高性能網絡,在 2015 年底加入百度自動駕駛事業部,負責車載計算系統及傳感器團隊。李義民曾在 Velodyne 作爲工程團隊核心成員研發激光雷達,並於 2016 年初加入百度自動駕駛事業部作爲傳感器團隊技術負責人進行各類新型傳感器技術的調研,目前擔任 Innovusion CTO 一職。
「也正是在百度的這段工作經驗,讓我們真正接觸到了市場需求,纔有機會下定決心出來創業。」鮑君威說。
在 Innovusion 團隊中,鮑君威偏重軟件算法及光學系統架構的部分,李義民則負責精密光學及電子這塊,二者的技術領域互補。在埋頭研發半年後,原型概念成型,他們才搬到新的辦公室開始招人。目前,Innovusion 團隊由幾十人組成,絕大部分都是擁有二、三十年工作經驗的工程師,其中有很多華人。
「我們着眼於兩個核心點,一是提升激光雷達的點雲密度從而獲得高密度、高清晰的圖像集,二是在此基礎上於硬件層面實現傳感器數據的融合。」鮑君威告訴機器之能。
據悉,Innovusion 的分辨率可以達到 300 線,是影響物體及場景識別精度的關鍵因素。不同於 128 線、64 線或是 32 線這類傳統的行業定義標準,這個 300 線指的並不是激光雷達的線束數目,而是可以通過串行、並行的「掃描」方式實現相當於 300 線激光雷達的分辨率。
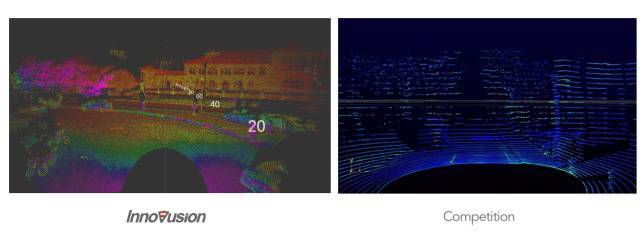
Innovusion 激光雷達探測結果與競品的比較
「自動駕駛必須得事無鉅細。」鮑君威解釋道,重點並不在於你能看到 99.99% 的東西,而在於那萬分之一看不到的可能性。分辨率越高,激光雷達所探測到的信息能漏掉的機會就越小,自動駕駛車輛發生事故的可能性也就越低。
那麼,爲什麼要定在 300 線呢?
「我們有段時間做到了 200 線,在原型模擬的時候我們覺得 200 線已經可以了。但是後來發現還是不行,存在缺陷,必須要到 300 線才能達到人眼的程度。」鮑君威回答道。在他看來,目前的交通系統都是爲人設計的,合乎人類的反應速度和人眼的分辨率,自動駕駛車輛應該無縫融入到這個體系中去。當激光雷達爲 300 線時,其分辨率接近人眼在視場中間幾十度的分辨率,可以達到人眼識別的水平。
此外,300 線的分辨率才能讓激光雷達掌握圖像級信息。從電腦到手機,都是從原始的文本信息向圖像級信息發展,也掀起了整個產業的從 0 到 1 的飛躍性革命。對於激光雷達來說,亦是如此。

圖像級信息引領革命性飛躍
硬件層次融合傳感器數據
「激光雷達的市場需求非常大。很多產品可能難點不在於技術,在市場上賣不出去纔是真痛苦。可激光雷達不同,產品技術性能做上去,只要能批量出貨,很多客戶搶着要。」鮑君威說道。
目前,專注激光雷達研發的公司都在緊鑼密鼓地嘗試不同路徑,試圖在該領域站穩腳跟或逆襲佔據絕對優勢。國外有 Velodyne 先行,國內有速騰聚創居上,成爲業內的領頭羊。與此同時,以 Quangergy、Luminar 爲代表的玩家也瞄準該領域,陸續推出新的產品原型,期望開闢出一番新天地。
目前,許多供應商會選擇利用軟件程序完成激光雷達、攝像頭、毫米波雷達或是 GPS 等數據融合,從而得到周圍環境的圖像信息。完美融合激光雷達點雲數據與其他傳感器的數據需要投入大量的時間和精力,涉及數據的同步、幾何空間的定位等問題。自動駕駛系統是一個實時的系統,在軟件層次完成傳感器數據的融合可能會造成時間上的延遲,並對計算效率產生一定的影響。
Innovusion 則選擇在硬件層面實現傳感器數據融合,原因在於:
一是在硬件層次實現傳感器數據的融合有機會提高感知及決策系統的可靠性及運行效率,減輕軟件層面的負擔;
二是硬件層面會有一部分難以傳輸出去的原始數據,在硬件層面做融合可以有效利用這些數據中包含的額外數據,從而提高系統的性能。
目前,Innovusion 已經實現了實時無縫融合激光雷達和攝像頭的數據,這背後密集的點雲數據必不可少。

融合後的三維彩色點雲數據
「其實不止 300 線,600 線我們也能做,只要合作伙伴有這個分辨率的需求,實現不是問題,但這裏涉及成本問題。」鮑君威補充道。
事實上,高昂的價格與供貨量的不足,是激光雷達難以大規模推廣應用的兩個難題。受到硬件製造工藝及精密儀器配置標準的制約,激光雷達成本居高不下,大規模量產也存在一定的門檻。有實力的企業能夠掌握一定的供貨渠道從而獲得相應的資源,對於小型初創公司來說卻往往處於「一票難求」的狀態。對此,Innovusion 的目標是將其激光雷達產品的價格壓到 一、兩千美金。
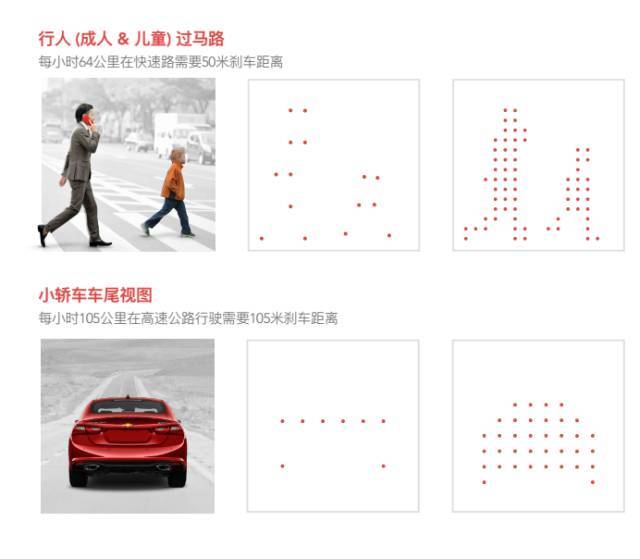
除了較高的分辨率,鮑君威表示,Innovusion 激光雷達產品的其他性能參數也可觀,探測距離超過 150 米。激光雷達的探測距離保障了自動駕駛車輛在複雜場景下擁有足夠的決策時間和剎車距離。車輛以每小時 64 公里的速度在快速路上行駛需要 至少 50 米探測距離,以每小時 105 公里的速度在高速公路上行駛則需要 至少 105 米的探測距離,而且車輛從感知環境到接收剎車信號並執行也需要一定的反應時間。出於安全方面的考量,技術研發人員希望激光雷達可以更精準地感知到更遠處的物體,而這種追求沒有上限。關鍵參數性能不僅是區分一款激光雷達優劣的重要指標,也是激光雷達製造廠商投入精力完善的方向之一。
對於激烈競爭帶來的挑戰,鮑君威表示並不會過分擔心。他們的目標客戶有兩大類,一類是進行測試的客戶,這類客戶注重激光雷達產品的性能,大家在產業鏈上是平等的。另一類是則是整車廠。
「有車隊的自動駕駛公司也是我們的潛在客戶,跟着整車廠走則是未來真正大量出貨的方式,」鮑君威解釋道,「我們不僅會提供激光雷達產品,也會與整車廠進行深度合作,幫助對方完成系統的集成。」

搭載在測試車上的 Innovusion 激光雷達原型
目前,大多數自動駕駛車輛都在車頂安裝了一個可以 360° 旋轉的激光雷達用於探測周邊環境信息。通常情況下,這種激光雷達需要架到一定的高度,不僅會在行駛的過程中增加風阻,改變車輛的空氣動力學性能,還會造成一定的陰影。這些因素都將成爲車廠實現規模化量產的阻礙。因此,Innovusion 的混合固態激光雷達解決方案易於整車集成,相對佔據優勢。
鮑君威透露,公司將參加明年的 CES 展會,並計劃於明年上半年啓動 Innovusion Developer Program,包括激光雷達 B Sample 以及 integration kits,支持合作伙伴部署測試。同時,公司已於近期啓動了 A 輪融資。