「在這個 自動駕駛祕密被嚴密保護的世界裏,這是前所未有的一步。」外媒如是評價。
上週加州自動駕駛脫離報告公佈的各大公司路測里程數,可以完美延伸出下一個問題:
如何讓這些辛苦積累下來的路測數據物盡所值?
其實上榜的每一家公司都十分清楚讓自動駕駛系統反覆「學習」這些寶貴道路數據的價值所在,也都幾乎掌握着一項與此相關的「祕密技術」:
把多達幾十萬甚至上百萬的真實路測數據,混合並匹配到一個虛擬環境中,讓自動駕駛系統把它當作真實場景繼續測試(實際上計算機並不知道其中的區別);
與此同時,你可以隨時調整數據,比較不同的模型,或藉此觀察車輛在不尋常事件下的表現。
通俗點說,這就是充分利用路測數據的有效方式之一,也是仿真模擬訓練平臺存在的價值。
而就在今天,Uber 卻突然宣佈把自己那套「可以幫助構建仿真測試環境」的可視化工具,給開源了。

大約兩年前,尚處在「自動駕駛第一軍團」的 Uber 還是媒體的寵兒。當他們通過一篇博客首次向外界公佈基於網絡(Web)的可視化技術平臺時,曾被媒體們大大宣傳了一番。
當然,這個可視化平臺受到關注的根本原因,不在於這項技術的複雜與先進性,而是 Uber 當時正在解決一個讓許多自動駕駛技術公司感到困惑的問題:
如何從構建環境的角度切入,來進一步增加數據的價值。
有趣的是,在 Uber 2017 年 8 月發佈博客前一週,谷歌的 Waymo 被大西洋月刊首次曝光了自己的模擬仿真工具 Carcraft,後者被描述爲讓 Waymo 自動駕駛系統水平迅速提升的關鍵因素。
而根據 Waymo 透露,雖然 2016 年在真實道路上的路測數據僅有 300 多萬英里,但在虛擬環境下的測試數字早已超過 25 億英里。
正是雙重測試方法的結合,讓谷歌在加州自動駕駛脫離報告上的「接管次數」大大降低。
似乎就是在那個時候,創造虛擬的測試環境纔開始被真正重視起來。
一週後,Uber 洋洋灑灑寫了幾千字來「炫耀」自己的這套數據可視化工具的高明之處。
簡單來說,就是:
「只要使用這套易上手的工具,工程師和操作人員就能快速檢查、調試以及分析實際路測與虛擬測試中收集到的所有信息。」

爲了便於理解,我們可以舉一個例子。
與普通導航地圖不同,自動駕駛所需的高精地圖會包含更多細節,譬如地面的高分辨率掃描,車道邊界與車道類型,轉彎、限速以及人行橫道……幾乎涵蓋了任何相關地理信息。
那麼高精地圖團隊,就可以利用這個可視化工具和多來源的數據集合,來檢查和更新某一交叉路口的高精地圖細節。
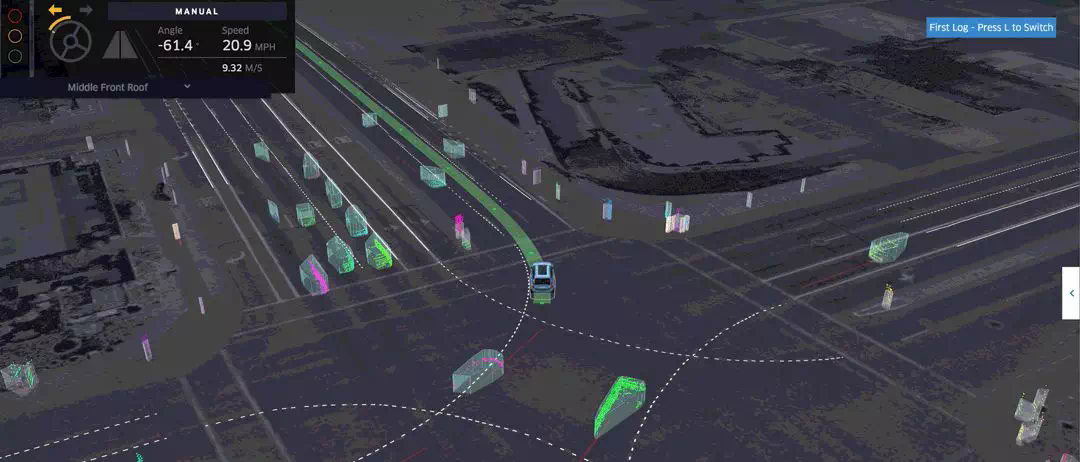
「我們嘗試通過建立一套視覺隱喻系統來表達複雜的道路數據。這套系統會爲地面圖像、車道標誌等環境元素提供現實的表現形式,讓工程師能夠錨定其對車輛周圍環境的理解。」Uber 在博客中解釋。
當然不止是高精地圖,這套工具也涉及到對自動駕駛系統本身感知、路線規劃以及決策能力的檢測與調試。
工程師們能夠利用車輛日誌在虛擬環境中實時播放和操縱攝像機,增加和減少場景中出現的物體,而這也被認爲是 Uber 數據可視化框架發揮作用的地方。
譬如,工程師們可以在這個平臺上比較兩個版本自動駕駛軟件生成的模擬結果;
再譬如,該可視化工具允許工程師打破和回放某些行程間隔,以便做進一步檢查。
如果要處理像遊行示威這樣影響路況的重大事件,那麼工程師就需要打開地圖,在平臺上關閉幾條主幹道,並增加大量行人和飄忽不定的人類駕駛員,來檢測自動駕駛系統如何對未見過的情況作出反應。
實際上,可視化僅僅是一種易於理解的技術表現形式。
從本質上來看,利用現有數據,生成有用數據,並最終提升人工智能的水平,纔是這類工具的目的。
此前並不是沒有技術企業發佈過類似的工具。
包括英偉達、英特爾在內的許多技術巨頭都有提供可生成虛擬世界的類似工具,但是這些工具顯然並不完美——
它們基於桌面,缺乏靈活性,非標準化,攝取的文件尺寸太大而不利於分享。
而在這篇兩年前的博客中,Uber 將自己的可視化工具的優點進行了詳細列舉,幾乎解決了上述問題:
可快速迭代
在 Web 上,以增量方式開發和部署特性是快速和容易的。如果用戶想要一個產品的最新版本,他們只需要刷新瀏覽器的頁面,而不是下載和安裝一個新應用程序。
具備靈活性,且容易分享
由於 Web 與硬件無關,任何人、任何地方都可以使用任何操作系統在平臺上工作。在網絡上,報告和診斷事故只需要點擊一個 URL。
具備協作性與個性化
每個團隊都有獨特的可視化和數據生成需求,因此,他們需要能夠定製自己的標準。
「HTML5 和 JavaScript 是經過測試和可信任的工具,用於動態創建定製化 UI,並且很容易集成到其他基礎設施和任務管理系統中。」Uber 在博客中強調。
當然,除了現有工具存在問題,許多「技術高超」的自動駕駛公司也不願以及很少公開自己的可視化工具(或仿真模擬平臺)。
譬如谷歌做了 11 年自動駕駛,但其虛擬仿真工具 Carcraft 兩年前才被曝光;
技術創業公司 Drive.ai 也曾在 2018 年介紹過 4 款可視化工具(儀表板顯示器、3D 數據可視化、註釋數據集以及交互式模擬),但也只供內部工程師使用。
而 Uber 在此之前,也只允許內部工程師使用這套工具,兩年前那篇博客的最後一句話,可以被看作是一個招聘啓事:
「如果你對『繪製』自動駕駛技術感興趣,歡迎加入 Uber 數據可視化團隊……」

但這次 Uber 的特別舉動,讓 Venturebeat 等著名科技媒體稱讚其「爲全球自動駕駛開發工具生態系統做出了開源貢獻」。
「包括上週開放了自己二維/三維場景圖形庫的 Cruise,兩家公司的舉動讓人感到欣慰。
在這個自動駕駛祕密被嚴密保護的世界裏,這是前所未有的一步。雖然這一步還很小,但它有望鼓勵開發人員開發出各種酷炫的應用程序,最終能夠提升整個行業。」科技媒體 The Verge 如此評價。
目前,這款開源工具與負責開發自動駕駛汽車平臺的 Uber 先進技術研發部使用的套件是相同的,甚至包括 Voyage 和 Applied Intuition 在內的幾家自動駕駛公司也已經承諾會使用它。
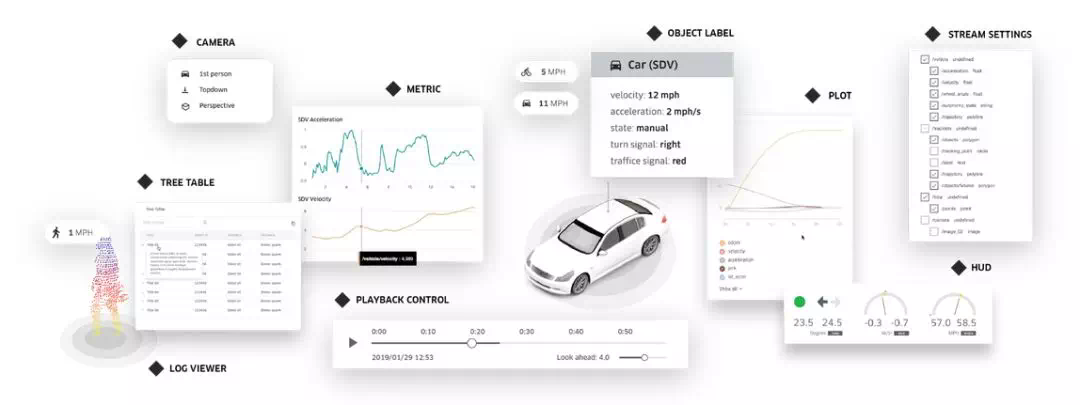
「能夠直觀地探索傳感器數據、被預測路徑、被跟蹤物體以及加速度等狀態信息,對於分類過程來說是無價的。
在 Voyage,我們會利用這些信息對工程優先級做出數據驅動型決策。」Voyage 的首席技術官 Drew Gray 在一份聲明中表示。