美國東部時間 3 月 19 日晚間,一輛 Uber 的自動駕駛汽車在亞利桑那州坦佩市的公共道路上與一名行人相撞,該行人在送往醫院後不治身亡。
警方在一份聲明中稱:「當時該車輛正往北行駛,一名女性在人行道外穿過一條四車道道路時被它撞倒。」
坦佩市警察局長西爾維婭·莫伊爾(Sylvia Moir)在接受採訪時稱:「基於受害人是從陰影中突然出現在馬路上的,很明顯,在任何一種模式(無人駕駛或人爲駕駛)下,都很難避免這種碰撞。」
這起意外事故將不僅影響 Uber 的自動駕駛的計劃,還將影響到整個無人駕駛行業最終發佈能在公共道路上行駛的無人汽車的計劃。

這則新聞將「無人駕駛技術」推向熱搜。
現有無人駕駛技術路線優缺點
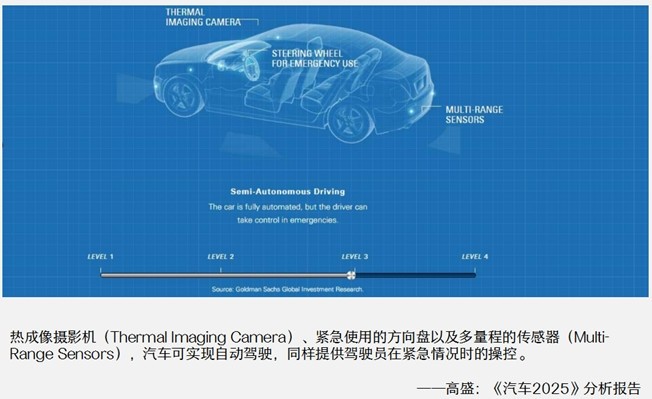
目前,國際上自動駕駛環境感知的技術路線主要有兩種:一種是以特斯拉爲代表的毫米波雷達主導的多傳感器融合方案,另一種以高成本激光雷達爲主導,典型代表如谷歌 Waymo。我們來分析一下這兩條線路對前方路況分析所使用的傳感器:
特斯拉的無人駕駛方案以毫米波雷達 + 可見光攝像頭爲主,最開始有 MobileEye 的參與,以可見光攝像頭爲主,毫米波雷達作爲輔助。出現撞卡車事件後,Tesla 改爲毫米波雷達爲主,可見光攝像頭爲輔。

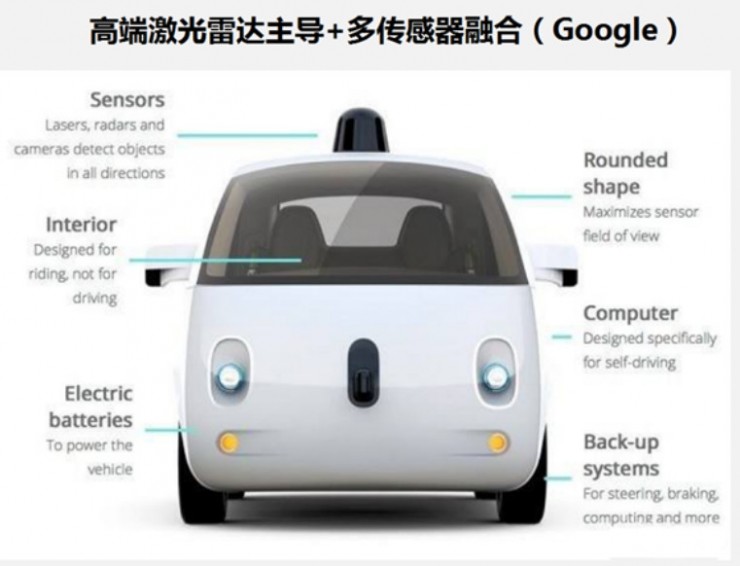
谷歌的方案基本上是以激光雷達爲主,毫米波雷達爲輔,可見光攝像頭幾乎不參與。谷歌似乎對可見光攝像頭一直不感冒,即使涉及到物體行爲識別,谷歌仍傾向於用三維激光雷達。
從上面我們可以看出目前市面上主流的前向路況檢測主要依靠以下三種傳感器:毫米波雷達、激光雷達以及可見光攝像頭,且只是兩個傳感器融合。下面我們來分析一下這三種傳感器的優劣勢:

上表中可以看出,目前主流的針對前向的傳感器融合方案都有一個顯著的缺點:在惡劣天氣情況下,只有毫米波雷達一個單傳感器可以起到作用,而毫米波雷達自身又難以識別行人。故現有的技術方案只能在正常天氣下工作,在惡劣天氣環境下(特別是光線不好的情況)會對路上行人的生命會造成極大的威脅。
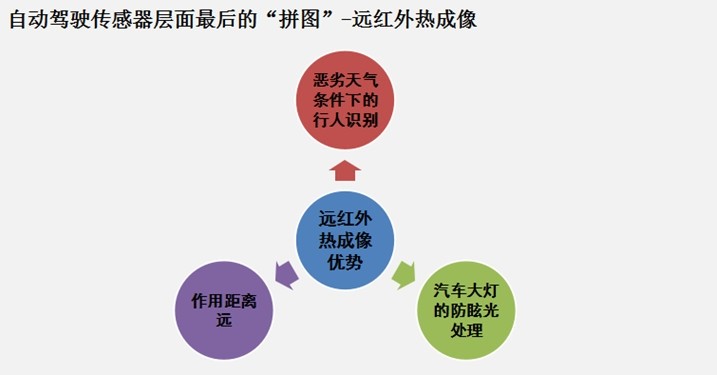
所以面對這種既要能在夜晚和惡劣的天氣情況下,解決視覺和行人識別的問題。看似無人駕駛未能找到解決方案,但其實我們忽略了,夜視傳感器中的遠紅外傳感器。遠紅外技術只考慮觀測主體與環境之間溫度差,可以不受光線情況影響。
遠紅外熱成像技術成像效果

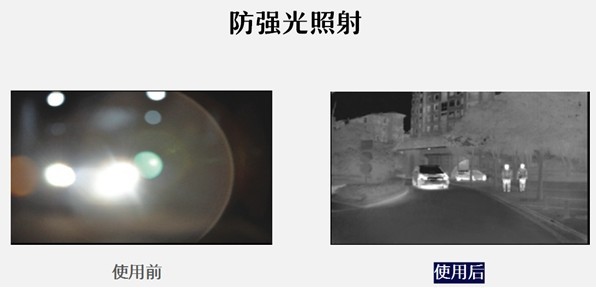

遠紅外熱成像原理,通過能夠透過紅外輻射的紅外光學系統將視場內景物的紅外輻射聚焦到能夠將紅外輻射能轉換爲便於測量的物理量的器件——紅外探測器上,紅外探測器再將強弱不等的輻射信號轉換成相應的電信號,然後經過放大和視頻處理,形成可供人眼觀察的視頻圖像,最終通過終端顯示、音響設備報警的夜間輔助駕駛產品。
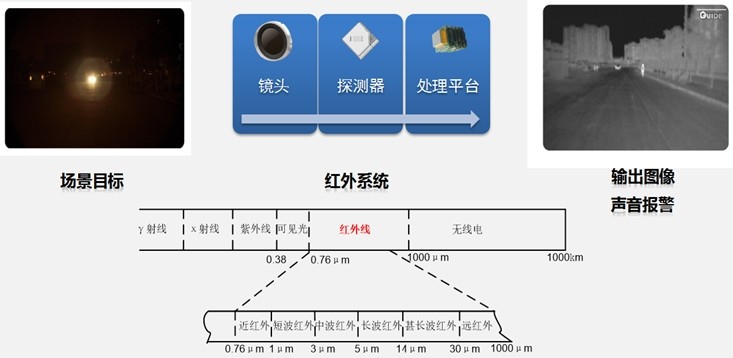
遠紅外熱成像系統下的行人監測效果圖



小結:慘痛的事故背後,免不了對無人駕駛技術的諸多質疑,但同時,又是促成該領域不斷完善的最大動力。飽含敬畏,大膽創新。